













Dreame Bot X50 Ultra השואב הרובוטי שמרים את רף הנקיון
הכירו את השואב הרובוטי החכם שמרים את הרף בניקיון! בעל יכולת הרמה אוטומטית למעבר מכשולים עד 60 מ”מ ועוצמת שאיבה של 20,000Pa, ניווט AI חכם השואב הזה מתמודד עם כל אתגר בקלות. שטיפה אוטומטית במים חמים, ייבוש באוויר חם וריקון עצמי מבטיחים ניקיון יסודי – בלי שתצטרכו להתאמץ!
 הסוף למכשולים הרובוט שמתרומםמעל מכשולים ומנקה בכל מקום
הסוף למכשולים הרובוט שמתרומםמעל מכשולים ומנקה בכל מקום
ב- Dreame Bot X50 Ultra קיימת טכנולוגיית ProLeap™ החדשה מאפשרת לרובוט לטפס ולהתגבר על מכשולים בגבהים שונים מדרגה אחת חדה של 4.2 ס”מ (כמו מפתני דלתות ומסילות הזזה) ועד 6 ס”מ בטיפוס הדרגתי מעל 2 מדרגות (למרפסות). הרובוט מצויד בבולמי זעזועים לתנועה חלקה ושקטה – פשוט מפעילים והוא מגיע לכל מקום.
*6 ס”מ: הרווח בין השלבים צריך להיות גדול מ-4 ס”מ. עבור חציית מכשול בודד ומדרגה אנכית אחת, גובה חציית המכשול הגבוה ביותר הוא 4.2 ס”מ. מבוסס על בדיקות המעבדה הפנימיות שלנו. התוצאות בפועל עשויות להשתנות בהתאם לגורמים סביבתיים.
הכוח שמנקה כל פינה – 20,000PA של שאיבה שלא משאירה שום לכלוך!
מנוע TurboForce החדשני מספק עוצמת שאיבה של 20,000Pa במהירות 90,000 סיבובים לדקה,לא משאיר סיכוי ללכלוך ולאבק וכל זה בשקט בזכות מנגנון הפחתת הרעשים ומטפל ביעילות בכל סוגי הלכלוך- החל מאבק ושערות ועד ללכלוך שהצטבר בחריצי הרצפה.

סורק, מנווט וזוכר את כל הבית – לניקיון יסודי
X50 Ultra משלב שתי טכנולוגיות חכמות במיוחד: חיישן סריקה פנורמי 360° המייצר מפה מדויקת של הבית וזוכר מעל 200 מכשולים קבועים ,וטכנולוגיית VersaLift ™ המאפשרת לו להנמיך את גובהו ל-8.95 ס”מ ולנקות ביעילות מתחת לרהיטים נמוכים. הרובוט פועל במדויק בכל תנאי תאורה ומנקה בצורה יסודית כל פינה בבית – תוך הימנעות ממכשולים.

ללא גבולות – שואב את כל סוגי המשטחים ביעילות ובמהירות!
ה Dreame Bot X50 Ultra בעל מברשת HyperStream™ מהפכנית עם זיפי גומי TPU ומבנה ספירלי שמטפלת בכל האתגרים מנקה ביסודיות רצפות קשות וחריצים, חודרת לעומק שטיחים תוך שמירה על הסיבים, שואבת וחותכת שערות ארוכות עד 30 ס”מ ומונעת היתקעות השערות במברשת השואב כך שתמיד נקי ובכל משטח

ניקוי ללא פשרות – כל פינה בבית תיהיה נקייה!
שתי טכנולוגיות מתקדמות: מערכת חכמה המרימה אוטומטית את המקרצפות בהתאם לסוג המשטח ומחליטה מתי לשאוב ומתי לשטוף, יחד עם מערכת הגעה מושלמת לכל פינה הכוללת מברשת צד ™ SideReach לניקוי צמוד לקירות ופאנלים, וזרוע מקרצפת MopExtend™ RoboSwing שמגיעה מתחת לרהיטים נמוכים.המבטיח ניקיון יסודי של כל הבית – גם במקומות שאחרים מפספסים.

עמדת עגינה חכמה – אוטומציה מלאה לניקיון מושלם ללא כל מאמץ מצדכם
עמדת העגינה החכמה PowerDock™ עם טכנולוגיית ™AceClean DryBoard מספקת פתרון תחזוקה מקיף ואוטומטי מילוי אוטומטי של מים נקיים מהמיכל וריקון מים מלוכלכים למיכל הייעוד ריקון מיכל האבק (עד 100 ימים ללא ריקון ידני)שטיפת המקרצפות וייבושן בטמפרטורה של 80° להסרת כתמים קשים ומניעת ריחות ועובש , בנוסף טכנולוגיית UV בשואב מפחיתה חיידקים ומזהמים בשקית האבק, להבטחת סביבה נקייה ובריאה. ה-X50 ULTRA מבצע ניקוי יסודי ומונע התפשטות חיידקים.

שואב שמתאים את עצמו
ה- Dreame X50 Ultra מצויד בטכנולוגיית חיישנים מתקדמת ומתאים אוטומטית את עוצמת הניקוי והשאיבה בהתאם לסוג המשטח ואף מרים את המקרצפות ב-10.5 מ”מ ומגביר את עוצמת השאיבה,או עוקף לחלוטין את השטיח למניעת הרטבה(לבחירתכם באפליקציה) בנוסף מבקר בחכמה את כמות המים הנדרשת בהתאם ללכלוך (32 רמות בקרה).תוך חיסכון מקסימלי במים וחשמל.

ללא שיער, ללא פרווה – ניקוי מדויק גם עם חיות מחמד בבית!
השואב X50 Ultra מצויד במערכת זיהוי חכמה המתמחה בניקוי אחרי חיות מחמד: מזהה את האזורים המועדפים עליהם ומנקה אותם ביסודיות, מגביר עוצמת שאיבה בזיהוי שאריות מזון וחול, ומטפל מיידית בכל לכלוך – תוך שמירה על מרחק בטוח מחיית המחמד.

פקודות קוליות לשואב – שליטה חכמה
עם ה-X50 ULTRA, כל שליטה היא פשוטה ומיידית. אפליקציית DreameHome מעניקה לכם שליטה מלאה על השואב הרובוטי X50 Ultra : תוכלו להגדיר שגרות ניקיון, לקבוע זמני הפעלה אוטומטיים, לעקוב אחר מצב הסוללה ולשלוט מרחוק בכל פעולות הניקיון.הטכנולוגיה המתקדמת מגיבה מיד לפקודות הקוליות באנגלית ופועלת גם ללא חיבור לאינטרנט – מושלם למצבים שדורשים תגובה מהירה!

*הפקודות הקוליות זמינות באנגלית בלבד
החיבור למערכות הבית החכם (Alexa, Siri ו-Google Home ) מאפשר אוטומציה מלאה והשתלבות חלקה עם שאר המכשירים החכמים בביתכם.
פקודות קוליות נפוצות באנגלית: Start cleaning/mopping, Clean the living room/bedroom/kitchen ,Clean up here, Self empty/Wash mops ,Pause/Go to Dock
הטבת השקה לרוכשים – מתנה בכל רכישה
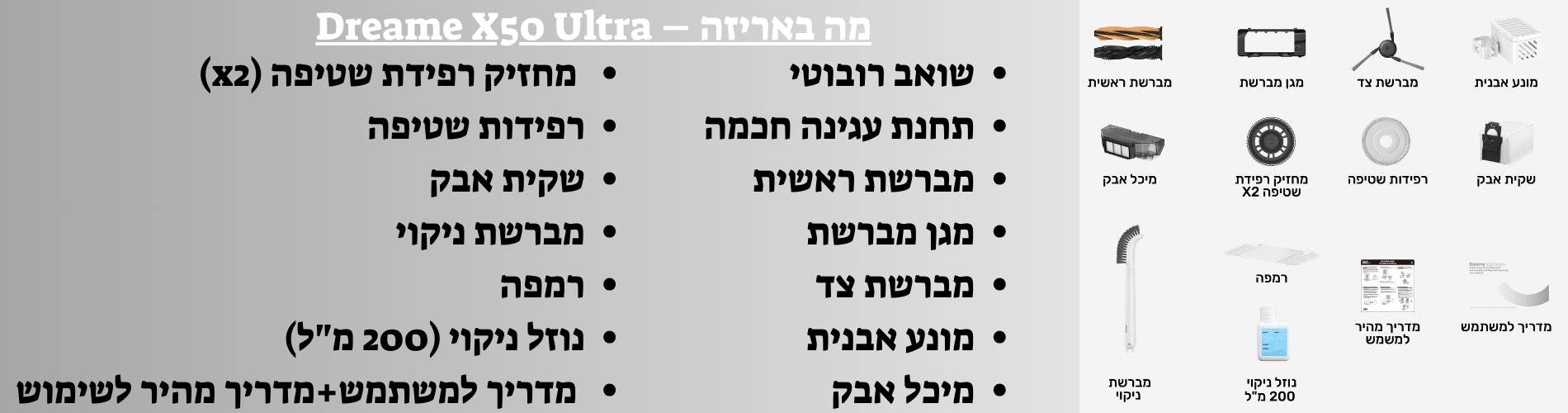
ערכת אביזרים נלווים בשווי 499 ש”ח: מברשת ראשית × 1, מברשות צד 2, מסנני אבק × 3, שקיות איסוף אבק × 3, רפידות שטיפה × 6 זוגות (סה”כ 12), נוזל ניקוי × 1 (1 ליטר)

טכני
מערכת ניווט וחיישנים
- ניווט חכם: VersaLift DToF
- מערכת הימנעות ממכשולים: AI RGB + תאורה מובנית 3D
- חיישן מתקדם לזיהוי לכלוך: ✓ (רב-ספקטרלי)
מברשות וניקוי
- סוג מברשת ראשית: HyperStream™ Detangling Duo Brush
- מברשת צד מתרוממת: ✓
- מברשת צד מתארכת: ✓
- הארכת מקרצפות: ✓
- הסרת מגב: ✓
עוצמת שאיבה וביצועים
- עוצמת שאיבה מקסימלית: 20,000Pa
- מערכת הרמת מקרצפות – עליה על שטיחים: ✓
- גובה מעבר מכשולים: 60 מ”מ (שתי מדרגות) | 42 מ”מ (מדרגה בודדת)
מיכלים וסוללה
- סוללה: 6,400mAh
- נפח מיכל אבק: 395 מ”ל
- נפח מיכל מים נקיים/משומשים: 4.5 ליטר / 4.0 ליטר
תחנת טעינה חכמה ותכונות מתקדמות
- שטיפת מגבים אוטומטית במים חמים (80°C): ✓
- ייבוש באוויר חם: ✓
- משטח ניקוי עצמי: ✓ (AceClean DryBoard™)
- הוספת חומר ניקוי אוטומטית: ✓
- מילוי מים אוטומטי: ✓
- ריקון אוטומטי: ✓
- ערכת חיבור מים אוטומטית: נרכשת בנפרד
שליטה ואינטגרציה
- שליטה קולית: מערכת מובנית ותמיכה במערכות חיצוניות
- ערכת אביזרים כלולה: ✓
מידות ומשקל
- מידות השואב: 350×350×89 מ”מ (חיישן מקופל) | 350×350×111 מ”מ (חיישן פתוח)
- משקל השואב: 4.53 ק”ג
- מידות תחנת הטעינה: 457×340×590 מ”מ
- משקל תחנת הטעינה: 9.09 ק”ג
 סרטון הדרכה עבור X50 ULTRA:
סרטון הדרכה עבור X50 ULTRA:

אין ביקורות למוצר זה.